Otsu’s method for binarizing images#
This page has some notes explaining Otsu’s method for binarizing grayscale images.
The best source on the method is the original paper. At the time I wrote this page, the Wikipedia article is too messy to be useful.
Conceptually, Otsu’s method proceeds like this:
create the 1D histogram of image values, where the histogram has \(L\) bins. The histogram is \(L\) bin counts \(\vec{c} = [c_1, c_2, ... c_L]\), where \(c_i\) is the number of values falling in bin \(i\). The histogram has bin centers \(\vec{v} = [v_1, v_2, ..., v_L]\), where \(v_i\) is the image value corresponding to the center of bin \(i\);
for every bin number \(k \in [1, 2, 3, ..., L-1]\), divide the histogram at that bin to form a left histogram and a right histogram, where the left histogram has counts, centers \([c_1, ... c_k], [v_1, ... v_k]\), and the right histogram has counts, centers \([c_{k+1} ... c_L], [v_{k+1} .. v_L]\);
calculate the mean corresponding to the values in the left and right histogram:
\[\begin{split} n_k^{left} = \sum_{i=1}^{k} c_i \\ \mu_k^{left} = \frac{1}{n_k^{left}} \sum_{i=1}^{k} c_i v_i \\ n_k^{right} = \sum_{i={k+1}}^{L} c_i \\ \mu_k^{right} = \frac{1}{n_k^{right}} \sum_{i={k+1}}^{L} c_i v_i \end{split}\]calculate the sum of squared deviations from the left and right means:
\[\begin{split} \mathrm{SSD}_k^{left} = \sum_{i=1}^{k} c_i (v_i - \mu_k^{left}) \\ \mathrm{SSD}_k^{right} = \sum_{i={k+1}}^{L} c_i (v_i - \mu_k^{right}) \\ \mathrm{SSD}_k^{total} = SSD_k^{left} + SSD_k^{right} \end{split}\]find the bin number \(k\) that minimizes \(\mathrm{SSD}_k^{total}\):
\[ z = \mathrm{argmin}_k \mathrm{SSD}_k^{total} \]the binarizing threshold for the image is the value corresponding to this bin \(z\):
\[ t = v_z \]
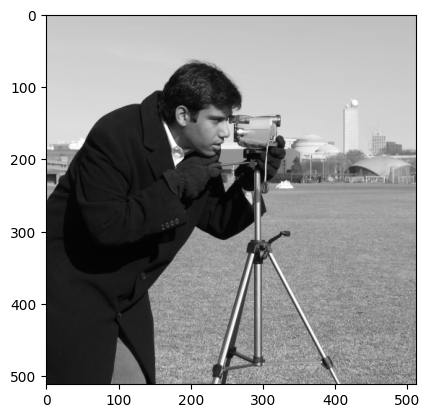
Here is Otsu’s threshold in action. First we load an image:
# Get the image file from the web.
import nipraxis
camera_fname = nipraxis.fetch_file('camera.txt')
camera_fname
Downloading file 'camera.txt' from 'https://raw.githubusercontent.com/nipraxis/nipraxis-data/0.5/camera.txt' to '/home/runner/.cache/nipraxis/0.5'.
'/home/runner/.cache/nipraxis/0.5/camera.txt'
# Loat the file, show the image.
import numpy as np
import matplotlib.pyplot as plt
cameraman_data = np.loadtxt(camera_fname)
cameraman = np.reshape(cameraman_data, (512, 512))
plt.imshow(cameraman.T, cmap='gray')
<matplotlib.image.AxesImage at 0x7f63ecd6e8f0>
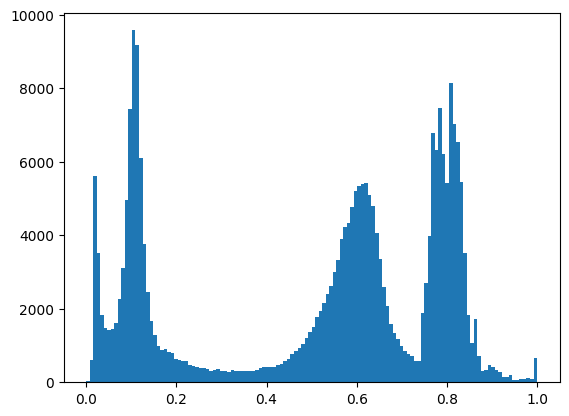
Make a histogram:
cameraman_1d = cameraman.ravel()
n_bins = 128
plt.hist(cameraman_1d, bins=n_bins)
counts, edges = np.histogram(cameraman, bins=n_bins)
bin_centers = edges[:-1] + np.diff(edges) / 2.
Calculate the threshold:
def ssd(counts, centers):
""" Sum of squared deviations from mean """
n = np.sum(counts)
mu = np.sum(centers * counts) / n
return np.sum(counts * ((centers - mu) ** 2))
total_ssds = []
for bin_no in range(1, n_bins):
left_ssd = ssd(counts[:bin_no], bin_centers[:bin_no])
right_ssd = ssd(counts[bin_no:], bin_centers[bin_no:])
total_ssds.append(left_ssd + right_ssd)
z = np.argmin(total_ssds)
t = bin_centers[z]
print('Otsu bin (z):', z)
print('Otsu threshold (c[z]):', bin_centers[z])
Otsu bin (z): 51
Otsu threshold (c[z]): 0.40234375
This gives the same result as the scikit-image implementation:
from skimage.filters import threshold_otsu
threshold_otsu(cameraman, n_bins)
np.allclose(threshold_otsu(cameraman, n_bins), t)
True
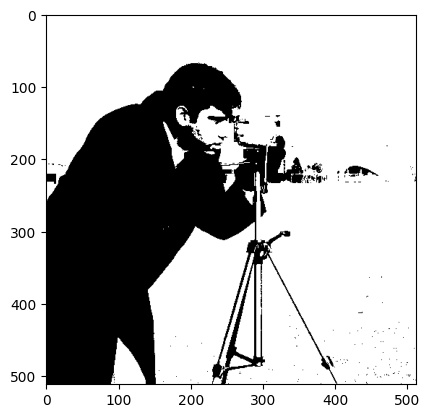
The original image binarized with this threshold:
binarized = cameraman > t
plt.imshow(binarized.T, cmap='gray')
<matplotlib.image.AxesImage at 0x7f63db834190>