
Testing a single voxel#
A short ago — Modeling a single voxel, we were modeling a single voxel time course.
Let’s get that same voxel time course back again:
import numpy as np
import matplotlib.pyplot as plt
# Print array values to 4 decimal places
np.set_printoptions(precision=4)
import nibabel as nib
import nipraxis
# Fetch the data file
bold_fname = nipraxis.fetch_file('ds114_sub009_t2r1.nii')
img = nib.load(bold_fname)
data = img.get_fdata()
data = data[..., 4:]
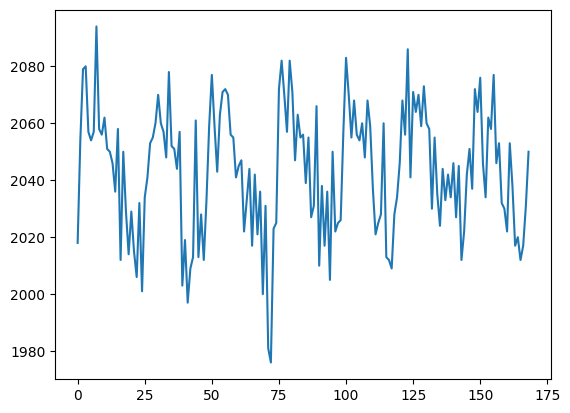
The voxel coordinate (3D coordinate) that we were looking at in Voxel time courses was at (42, 32, 19):
voxel_time_course = data[42, 32, 19]
plt.plot(voxel_time_course)
[<matplotlib.lines.Line2D at 0x7fca9c9485b0>]
We then compiled a design for this time-course and estimated it.
We used the convolved regressor from Convolving with the hemodyamic response
function in a simple regression.
conv_reg_fname = nipraxis.fetch_file('ds114_sub009_t2r1_conv.txt')
conv_reg_fname
'/home/runner/.cache/nipraxis/0.5/ds114_sub009_t2r1_conv.txt'
convolved = np.loadtxt(conv_reg_fname)
# Knock off first 4 elements to match data
convolved = convolved[4:]
N = len(convolved)
X = np.ones((N, 2))
X[:, 0] = convolved
plt.imshow(X, cmap='gray', aspect=0.1)
<matplotlib.image.AxesImage at 0x7fca9c9bfeb0>
\(\newcommand{\yvec}{\vec{y}}\) \(\newcommand{\xvec}{\vec{x}}\) \(\newcommand{\evec}{\vec{\varepsilon}}\) \(\newcommand{Xmat}{\boldsymbol X} \newcommand{\bvec}{\vec{\beta}}\) \(\newcommand{\bhat}{\hat{\bvec}} \newcommand{\yhat}{\hat{\yvec}}\)
As you will remember from introduction to the general linear model, our model is:
We can get our least squares parameter estimates for \(\bvec\) with:
where \(\Xmat^+\) is the pseudoinverse of \(\Xmat\). When \((\Xmat^T \Xmat)\) is invertible, the pseudoinverse is given by:
We find the \(\bhat\) for our data and design:
import numpy.linalg as npl
Xp = npl.pinv(X)
beta_hat = Xp @ voxel_time_course
beta_hat
array([ 31.1855, 2029.3677])
Our plan now is to do an hypothesis test on our \(\bhat\) values.
The \(\bhat\) values are sample estimates of the unobservable true \(\bvec\) parameters.
Because the \(\bhat\) values are sample estimates, the values we have depend on the particular sample we have, and the particular instantiation of the random noise (residuals). If we were to take another set of data from the same voxel during the same task, we would get another estimate, because there would be different instantiation of the random noise. It’s possible to show that the variance / covariance of the \(\hat\beta\) estimates is:
where \(\sigma^2\) is the true unknown variance of the errors. See wikipedia proof, and stackoverflow proof.
We can use an estimate \(\hat\sigma^2\) of \(\sigma^2\) to give us estimated standard errors of the variance covariance (see: Unbiased estimate of population variance):
y = voxel_time_course
y_hat = X @ beta_hat
residuals = y - y_hat
# Residual sum of squares
RSS = np.sum(residuals ** 2)
# Degrees of freedom: n - no independent columns in X
df = X.shape[0] - npl.matrix_rank(X)
# Mean residual sum of squares
MRSS = RSS / df
# This is our s^2
s2_hat = MRSS
print(s2_hat)
print(np.sqrt(s2_hat))
247.93757096349455
15.746033499376741
We now have an standard estimate of the variance / covariance of the \(\bhat\):
v_cov = s2_hat * npl.inv(X.T @ X)
In particular, I can now divide my estimate for the first parameter, by the standard error of that estimate:
numerator = beta_hat[0]
denominator = np.sqrt(v_cov[0, 0])
t_stat = numerator / denominator
print(t_stat)
12.826780099049788
I can look up the probability of this t statistic using scipy.stats:
from scipy.stats import t as t_dist
# Get p value for t value using cumulative density dunction
# (CDF) of t distribution
ltp = t_dist.cdf(t_stat, df) # lower tail p
p = 1 - ltp # upper tail p
p
0.0
Compare our manual estimation to R#
Finally let’s save the voxel time course for us to compare this analysis to
the lm estimation in R:
np.savetxt('voxel_time_course.txt', voxel_time_course)
Here are the commands to run the same analysis in R:
# Simple regression model in R
# Load the voxel time course
voxels = read.table('voxel_time_course.txt')$V1
# Load the convolved regressor
convolved = read.table('ds114_sub009_t2r1_conv.txt')$V1
# Drop the first four values to correspond to the data
convolved = convolved[-(1:4)]
# Fit linear model
res = lm(voxels ~ convolved)
print(summary(res))
The result from the R script is:
Call:
lm(formula = voxels ~ convolved)
Residuals:
Min 1Q Median 3Q Max
-53.368 -9.747 0.253 9.353 40.579
Coefficients:
Estimate Std. Error t value Pr(>|t|)
(Intercept) 2029.368 1.635 1241.40 <2e-16 ***
convolved 31.186 2.431 12.83 <2e-16 ***
---
Signif. codes: 0 ‘***’ 0.001 ‘**’ 0.01 ‘*’ 0.05 ‘.’ 0.1 ‘ ’ 1
Residual standard error: 15.75 on 167 degrees of freedom
Multiple R-squared: 0.4963, Adjusted R-squared: 0.4933
F-statistic: 164.5 on 1 and 167 DF, p-value: < 2.2e-16